Die NAREF-Boje
Die NAREF-Boje
F. Sender
NAREF ist eine Abkürzung für NAvigations-REFerenz. Damit ist dieses Bojenkonzept eindeutig in die Kategorie der Navigationsbojen eingestuft. Von den vielen für Navigationszwecke eingesetzten Bojenarten, wie Heulbojen, Markierungsbojen, Warn- und Bakenbojen unterscheidet sie sich, abgesehen von ihrem hochmodernen elektronischen Eingeweide, auch durch das vorgesehene Einsatzgebiet, die Tiefsee, in der man wegen des großen Verankerungsaufwandes nur ungern Bojen setzt.
Dieses Bojenkonzept wurde von uns vorgeschlagen, um die besonders schwierigen Navigationsaufgaben zu lösen, die ein Tiefsee-Forschungsschiff, wie z. B. das deutsche FS "Valdivia", in Gegenden antrifft, die jenseits der Reichweite landgebundener Radionavigationsketten liegen und deren große Wassertiefe eine Koppelnavigation nach dem Sonar-Dopplerverfahren nicht zuläßt. Dies ist z. B. bei der Manganknollenprospektion im Südpazifik der Fall.
Zwar gibt es das hochmoderne Satellitennavigationssystem mit globaler Reichweite. Die Umlaufbahnen der Satelliten liegen jedoch relativ niedrig und laufen über die Erdpole. Dadurch ist nur dann sporadisch eine Ortsinformation möglich, wenn ein Satellit in gutem Sichtwinkel für das Schiff über dem Horizont durchläuft. Es sind zwar 6 Satelliten im Umlauf, die in Polnähe am häufigsten und am Äquator am seltensten auftauchen ; sie sind jedoch nicht in ihren Umläufen synchronisiert. Es kann vorkommen, daß die Durchgänge sich zeitweilig häufen, daß aber auch oft für sehr lange Zeit kein brauchbarer Durchgang erfolgt. in Äquatornähe liegt die mittlere Zeit zwischen zwei Durchgängen zwar unter zwei Stunden, aber ein Schiff muß auch manchmal 6-8 Stunden auf einen brauchbaren Satelliten-Durchgang warten. Ein Forschungsschiff braucht aber jederzeit eine genaue Standortinformation; deshalb ist zur Ü̈berbrückung der Lücken zwischen den Satellitendurchgängen ein Koppelnavigationssystem erforderlich, dessen auflaufender Fehler für die Zeitintervalle zwischen brauchbaren Satellitendurchgängen möglichst gering ist.
Für Forschungsaufgaben im Bereich der Festlandsockel mit Wassertiefen bis zu etwa 300 m ist das auf unseren Schiffen PROSPEKTA und EXPLORA installierte SonarDopplernavigationssystem gut für die Ergänzung des Satellitenverfahrens geignet. Bei größeren Wassertiefen ist das Sonar-Bodenecho aber zu schwach, so daß nur noch gegen eine immer vorhandene Streustrahlung vom Wasser her gemessen werden kann. Durch den Stromversatz und die Bewegung von Fisch und Planktonschwärmen wird die Sonarmessung aber dann zu ungenau.
In der bisherigen Phase der Tiefseemessungen des FS "Valdivia" konnte die Satellitennavigation noch durch eine in das von uns entwickelte INDAS-System integrierte Loran-C-Radionavigations-Empfangsanlage gestützt werden, obwohl bereits weit außerhalb der normalen Reichweite der Hawaii-Kette gearbeitet wurde. Die Entfernungen zu dieser südlichsten Loran-C-Kette werden jedoch mit wachsendem Arbeitsfortschritt immer größer, so daß auch hier auf längere Sicht keine brauchbare Hilfe mehr zu erwarten ist.
So lag, wegen Mangels an natürlichen Inseln im Südpazifik, der Gedanke nahe, eine künstliche Insel als Navigationsträger zu schaffen, z. B. in Form einer Boje. Für Navigationszwecke sucht man im allgemeinen jedoch einen ortsfesten Bezugspunkt, den eine Insel ja darstellt. Bojen hängen aber nur an einem oder mehreren dünnen Ankerseilen. Die erwarteten Wassertiefen sind größer als 5000 m; daher muß man einen recht großen Abdriftfehler (Schwojkreis) in Kauf nehmen, oder man müßte die Boje an drei bis vier Punkten - und daher sehr aufwendig verankern. Diese große Wassertiefe läßt auch bei Sonartranspondern keine brauchbaren Reichweiten erwarten. Transponder (Kurzwort, zusammengesetzt aus transmit = senden und respond = antworten) werden direkt auf dem Meeresgrund aufgestellt und beispielsweise vielfach zur sog. dynamischen Positionierung von schwimmenden Bohrinseln eingesetzt.
Das NAREF-Konzept läßt einen beträchtlichen Schwojkreis der Navigations-Boje um den Verankerungspunkt zu und erfordert damit kein aufwendiges Verankerungssystem. Voraussetzung ist allerdings, daß die zeitliche Änderung der Abdrift gering ist. Dies ist in den vorgesehenen Einsatzgebieten - den Passatwindzonen - zu erwarten, wo relativ konstante Wind- und Strömungsverhältnisse über längere Zeiträume vorherrschen. Eine ausreichend genaue Positionsbestimmung wird dadurch erreicht, daß die tatsächliche Bojenposition durch Rückwärtseinmessung der Boje vom Schiff aus während der sporadisch aufgenommenen Satellitendurchgänge laufend verfolgt und aufdatiert wird: Zwischen den Satellitendurchgängen dient die Boje also unter Berücksichtigung der ermittelten Abdriftrate zur genauen Bestimmung der Schiffsposition. Hiermit ist ersichtlich, daß das NAREF-Konzept auf einer wechselweisen Positionsbestimmung von Boje und Schiff beruht. Wenn das Schiff eine der verhältnismäßig seltenen Positionsinformationen durch die Satellitennavigation erhält, wird die gespeicherte Bojenposition aufdatiert; ansonsten bestimmt das Schiff seine Position relativ zur Boje.
Unser Konzeptvorschlag für die NAREF-Boje wurde von den an der Tiefseeforschung mit dem FS "Valdivia" beteiligten Gruppen positiv aufgenommen. Die "Gesellschaft für Kernenergieverwertung in Schiffbau und Schiffahrt" (GKSS) erhielt zu Ende 1973 den Auftrag vom Bundesministerium für Forschung und Technologie (BMFT), die Entwicklung eines solchen Navigationssystems zu veranlassen. In zahlreichen Vorbesprechungen zwischen PRAKLA- SEISMOS, GKSS, verschiedenen Bojenherstellern und -Spezialisten, bei denen es im wesentlichen um geeignete Trägerbojen, Verankerungen und Stromversorgungsanlagen ging, nahm das Entwicklungsvorhaben schließlich konkrete Formen an.
Fig.1
Frontansicht des NAREF-Empfängers
Front view of the NAREF receiver
Im September 1974 erhielt PRAKLA-SEISMOS den Auftrag zur Entwicklung und Herstellung der elektronischen Einrichtungen, welche zur Realisierung eines Versuchsmusters des NAREF-Systems auf Schiff und Boje nötig waren. Den Zuschlag für die Lieferung der Tägerboje mit Stromversorgung und Verankerung erhielt die Fa. Hagenuk in Kiel. In einer ersten Ausbaustufe sollte die elektronische Ausrüstung im wesentlichen nur eine überprüfung des Verankerungssystems und des Bojenverhaltens im Einsatzgebiet ermöglichen.
Die elektronische Ausrüstung der Boje (siehe Figuren 1 und 2) besteht aus einem 60-W-Grenzwellensender, weIcher eine Folge von zwei verschiedenen Trägerfrequenzen im Bereich zwischen 1,6 und 2 MHz ausstrahlt. Diese Trägerfrequenzen werden entsprechend unserem ANA-Verfahren von einem hochstabilen Atomfrequenznormal stabilisiert. Die abgestrahlte Antennenspannung wird zusätzlich phasenstabilisiert, um den Einfluß der Verstimmung der Antenne durch wechselnde Neigungswinkel der Boje auszuschalten.
Zur Meßwertübertragung können die Trägerfrequenzen zusätzlich mit Hilfsträgern phasenmoduliert werden. Zunächst ist nur ein Hilfsträger installiert, welcher einen zu geringen Ladezustand der Versorgungsbatterien signalisiert. Unterschreitet dann aber die Batteriespannung einen gewissen Mindestwert, so wird der Sender automatisch so lange außer Betrieb gesetzt, bis wieder ein ausreichender Ladezustand erreicht ist.
In einer zweiten Ausbaustufe ist die Installation eines zusätzlichen Empfangssystems für das OMEGA-Navigationsverfahren geplant. Um eine einzige Antenne wechselseitig zum Aussenden der ANA-Trägerfrequenzen und zum Empfang der OMEGA-Signale verwenden zu können, ist die Ansteuerstufe für den Bojensender so ausgelegt, daß dieser im gleichen Zeitrhythmus getastet werden kann, wie die weltweit verteilten OMEGA-Stationen. Damit können die Sendezeiten der Boje so gelegt werden, daß sie mit denen für den Ort ungeeigneten OMEGA-Sendern zusammenfallen und somit die Antenne jeweils zum Empfang der für das Einsatzgebiet geeigneten OMEGA-Sender frei ist.
Für das Meßschiff wurde ein Navigationsempfänger entwickelt, von dem die Trägerfrequenzen des Bojensenders aufgenommen werden; ihre Phase wird mit der eines Signales der gleichen Frequenz verglichen, das von einem ebenfalls installierten Atomfrequenznormal stammt. Aus diesen Phasenmessungen wird eine Laufzeitinformation abgeleitet, deren Mehrdeutigkeit durch Messungen bei zwei verschiedenen Trägerfrequenzen verringert wird. Ein eingebauter Redundanzrechner bringt etwaige Standliniensprünge sofort zur Anzeige (Standlinie = Kreis mit dem Radius Sender/ Schiff, mit dem Sender als Mittelpunkt). Das Hilfsträgersignal für die Batterieüberwachung wird dekodiert und läßt ein Blinksignal aufleuchten, wenn die Versorgungsspannung der Boje einen bestimmten Wert unterschritten hat.
Die Fa. Hagenuk lieferte die Boje mit Batterien, zwei Windgeneratoren zur Batterieladung, einer 5-m-Stabantenne, Befeuerung und Radarreflektor sowie das Verankerungssystem.
In der ersten Ausbaustufe liefert die Bojenelektronik bereits eine wesentliche Information: die Einweg-Radiolaufzeitmessung vom Bojensender zum Schiffsempfänger mit einer Reichweite von über 200 km. Diese kann zur Verfolgung und Aufdatierung der Bojenposition nach einem Schema ausgewertet werden, das die Figur 3 zeigt.
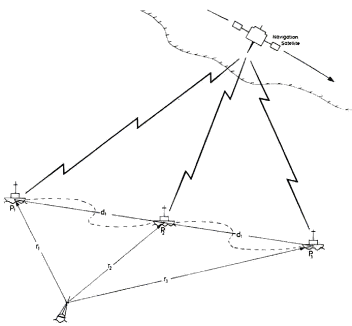
Fig.3
Schema für die Verfolgung und Aufdatierung der Bojenposition
Scheme for tracing and updating the buoy's position
Während der Meßfahrt erhält das Schiff für die Punkte P₁ , P₂ und P₃ Positionsbestimmungen durch Auswertung von Satellitendurchgängen. Die durch Laufzeitmessung erhaltenen Entfernungen der Boje zu diesen Punkten sind r₁, r₂ und r₃. Die Strecken d₁ und d₂ lassen sich von den Satellitenpositionen ableiten. Durch Trilaterationsrechnung mit rl₁ , r₂, d₁ sowie r₂, r₃ d₂ und r₁ , r₃, (d₁+ d₂) kann die Bojenposition zu den Satellitenortungen dreifach überbestimmt werden. Eine mindestens dreifache überbestimmung ist allerdings notwendig, da der Gleichlauf der Atomfrequenznormale nicht völlig genau ist, wodurch sich ein Entfernungsmeßfehler mit statistischem Gang ergibt, welcher als zusätzliche Unbekannte in die Rechnung eingeht.
In der Praxis erhält man nun laufend Satellitenpositionen, so daß auch die Positionierungsungenauigkeit des Satellitensystems über eine Vielzahl von Meßpunkten ausgemittelt werden kann. Die Verbindungslinien zwischen den Punkten P₁, P₂ und P₃ brauchen keinesfalls gerade zu sein. Das Schiff kann einen beliebigen Kurs fahren, es muß nur wirklich Fahrt machen, damit die Strecken d₁, d₂ usw. brauchbare Werte für die Rechnung annehmen. Zwischen den Positionsbestimmungen durch Satelliten stehen die zur Boje gemessenen Entfernungen für das Schiff als zusätzliche Navigationshilfe zur Verfügung. Zur Ortsbestimmung reicht jedoch eine gewonnenen Standlinie allein nicht aus (die Position des Schiffes ist der Schnittpunkt von zwei Standlinien). Allerdings kann diese in vielen Fällen mit der Standlinie einer Landstation gepaart werden. So ist z. B. im Südpazifik oft noch ein Sender der Loran-C Kette von Hawaii gut zu empfangen, während alle anderen wegen ihrer ungünstigen Einfallswinkel für eine Ortsbestimmung ausfallen. Hier kann die NAREF-Boje bei geeigneter Position von großem Nutzen sein. Um Ortsbestimmungen nur mit der Boje zu ermöglichen, kann auch die Funkpeilanlage zur Richtungsbestimmung mitbenutzt werden. Aus der Entfernung Boje/Schiff und dem Peilrichtungswinkel kann die Position des Schiffes relativ zur Boje bestimmt werden. Wegen der Unschärfe bei der Peilrichtungsmessung und der typisch geringeren Empfindlichkeit des Funkpeilempfängers ist die Anwendbarkeit dieses Verfahrens jedoch auf Entfernungen bis 30 km begrenzt.
In der zweiten Ausbaustufe soll die mit dem OMEGA-Radionavigationsverfahren erzielbare Genauigkeit mittels der Naref-Boje soweit verbessert werden, daß das Verfahren auch in der Tiefseeforschung eingesetzt werden kann.
OMEGA ist ein Weitbereichsnavigationssystem; welches in der augenblicklichen Ausbaustufe schon kurz vor dem angestrebten Ziel einer weltweiten Bedeckung steht. Es arbeitet im sog. VLF (Very Low Frequency)-Bereich trägerfrequenzen übertragen. Auf dem Schiff werden die Wellenlängen bis zu 30 km, deren Größenordnung bereits in die des Abstandes der inosphärischen Schichten (70-90 km) zur Erdoberfläche fällt. Der Zwischenraum zwischen Erde und Ionosphäre wirkt dann wie ein Weilenleiter und es ergeben sich Wellenausbreitungsformen, wie man sie bei Hohlleitern im Mikrowellenbereich kennt.
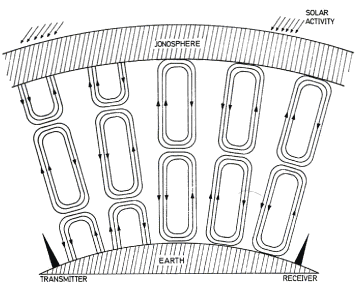
Fig.4
Wellenausbreitungsformen von einem OMEGA-Sender
Wave propagation modes from an OMEGA transmitter
Normalerweise werden vom OMEGA-Sender zwei Ausbreitungsformen angeregt (Fig. 4), die erwünschte primäre und eine unerwünschte sekundäre Form. Diese beiden Formen überlagern sich wechselseitig und führen zu Instabilitäten in der empfangenen Phasenlage. Die Phasenstabilität ist auch von einer konstanten Höhe der ionosphärischen Schichten abhängig; diese Höhe wechselt jedoch mit der Sonneneinstrahlung. Schließlich werden sporadische Anomalien durch Sonneneruptionen und durch die sogenannte Polkappenabsorption verursacht. All dies führt dazu, daß das OMEGA-Verfahren durch Weilenausbreitungsanomalien in seiner Genauigkeit stark eingeschränkt wird.
Werden für die normalen Ausbreitungsschwankungen abhängig von der Sonneneinstrahlung im Ausbreitungsweg Korrekturen angebracht, so kommt man auf Ortungsfehler von ein bis drei Seemeilen. Dieser Fehler kann weitgehend kompensiert werden, wenn möglichst dicht bei dem Meßfahrzeug eine ortsfeste Empfangsstation ihre OMEGA Meßwerte übermittelt und zur Positionsbestimmung nur die Differenz der Meßwerte zwischen ortsfestem und beweglichem Empfänger ausgewertet wird. Damit schaltet man die Ausbreitungsanomalien aus, welche sich auf dem Teil des Wellenweges ergeben, der für beide Empfangsstationen gemeinsam ist. Diese Navigationsart wird Differential- OMEGA genannt; sie führt zu Verbesserungen der Ortungsgenauigkeit um den Faktor 5 bis 20, abhängig vom Abstandsverhältnis Schiff-Feststation zu Schiff-Sendestation. Je näher also die Feststation zum Schiff liegt, desto besser ist das Ortungsergebnis.
In Figur 5 sind schematisch die Navigationshilfen der NAREF-Boje mit Differential-OMEGA dargestellt. Außer der Laufzeitinformation D , deren Auswertbarkeit im wesentlichen bereits beschrieben wurde, werden beispielsweise von der Boje drei Laufzeitwerte d'₁, d₂, d₃ zu drei OMEGA-Sendern ermittelt und zum Schiff mittels zusätzlicher Hilfsträgerfrequenzen übertragen. Auf dem Schiff werden die Werte d'₁ d'₂ und d'₃ gemessen und die Differenzwerte d'₁-d₁ = δ₁, d'₂-d₂ = δ₂ und d'₃-d₃ = δ₃ gebildet. Aus den Werten δ₁, δ₂ und δ₃ wird die Entfernung vom Schiff zur Boje bestimmt. Da δ₁, bis δ₃ im Allgemeinen wesentlich kleiner sind als die Werte d'₁ bis d'₃, können sich hier ionosphärische Ausbreitungsanomalien viel weniger auswirken.
Im März 1975 erfolgte auf der Insel Helgoland der Einbau der Bojenelektronik in den von Hagenuk gelieferten Bojenkörper. Da die Fertigung beider Geräteeinheiten gut abgestimmt war, ging eine Funktionsprobe reibungslos vonstatten. Die Antennenabstimmung erfolgte bei geschleppter Boje im Hafenbecken. Auch hierbei gab es keine Schwierigkeiten. Jedoch wurde als hinderlich empfunden, daß HeIgoland und Hawaii zwar den Anfangsbuchstaben und das hohe Preisniveau, aber nicht das gute Wetter gemeinsam haben. Wegen schlechten Wetters mußte zunächst auf die vor Helgoland vorgesehene Verankerung der Boje verzichtet werden. Es wurde lediglich eine Empfangskontrolle im Hafenbereich durchgeführt. Den eindrucksvollsten Nachweis für gute Abstrahlung unserer Sendeleistung erbrachte ein Engländer, welcher mit einem Kontrollempfänger im Hafen von Helgoland eifrig nach einem "Störsender" suchte, welcher eine Decca-Hi-Fix-Station, die auf der anderen Seite der Insel im Frequenzbereich unserer Boje arbeitete, aus der Synchronisation brachte.
Noch im gleichen Monat konnte dann ein Reichweitetest durchgeführt werden. Die Verankerung der Boje vor Helgoland hatte geklappt und der Empfänger wurde in einem Landfahrzeug an verschiedene Punkte der nordfriesischen Küste gebracht, um die Empfangsfeldstärken bei unterschiedlichen Entfernungen zu kontrollieren. Angefahren wurden Punkte dicht an der See in St. Peter-Ording, auf Sylt und Fano sowie in Blavandshuk. Die Entfernungen zur Boje lagen zwischen 50 und 160 km. Die Meßergebnisse lassen auf erzielbare Reichweiten von mehr als 200 km über See schließen.
Einige Schwierigkeiten gab es mit den Windflügeln der Windgeneratoren; beim Abstimmen der Antenne mußten sie vorsorglich festgebunden werden, um eine nicht vorgesehene Funktion als "Fleischhackmaschine" zu unterbinden. Nachdem gleich anfangs durch unglückliches Anschlagen an eine Hafenmole ein Flügel beschädigt und später beide Generatoren ihres Flügelschmuckes beraubt wurden, war während der Reichweitemessung keine Batterieladung möglich. Um zukünftig derartige Schäden zu verhindern, wurde eine Schutzkonstruktion um den Flügelaußenradius angebracht.
In der Zwischenzeit wurde die Boje nach Hawaii gebracht. Sie soll dort unter Einsatzbedingungen, wie sie bei einer Tiefseeverankerung vorliegen, getestet und endgültig abgenommen werden. Dieser Akt soll, nach dem Einlaufen der "Valdivia" in Honolulu, noch in diesem Jahr erfolgen.
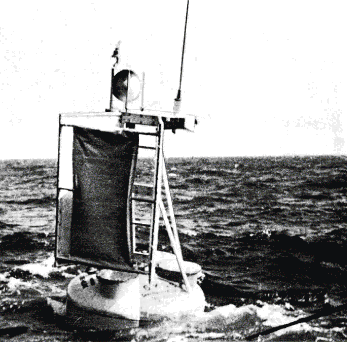
Die NAREF-Boje im Hafen von Helgoland The NAREF buoy in the harbour of Heligoland
The NAREF Buoy
NAREF is an abbreviation for NAvigation REFerence. This name clearly shows that the buoy design it describes falls under the classification "navigation buoy". Of the many types of buoys employed for navigation purposes, such as howling buoys, marker buoys, warning and beacon buoys, the NAREF buoy is different. This is not only because of its highly modern electronics but also because it is designed for use in deep seas where, due to mooring problems, the use of buoys is normally avoided.
We suggested this buoy design to solve particularly difficult navigation problems, which an ocean-going research vessel - such as the German "FS VALDIVIA" - encounters when beyond the range of shore-based radio navigation chains and when the large water-depths do not permit dead reckoning navigation, using the sonar doppler method. This is the case for example in Manganese-Nodule exploration in the South Pacific.
It is true of course that a highly modern satellite navigation system exists with a world-wide range. But satellites orbit relatively low and pass the earth's poles. Hence only sporadic positioning data is available whenever a satellite passes the sky at a good viewing-angle for the vessel. There are actually six satellites in orbit which appear most frequently over polar regions and comparatively seldom over the equator, however, they are not synchronized in their orbits. It can happen that for a lhort period there are many satellite passes crowded, then for a much longer period there are no usable ones. Although near the equator the average time between two satellite passes is a little under two hours, a ship must sometimes wait up to 6 to 8 hours for the next usable pass. A research vessel needs continuous positioning data so a dead reckoning navigation system is necessary to fill the gaps between satellite passes. The accumulative systematic error in the time intervals between usable satellite passes arising from such a dead reckoning navigation system must be as small as possible.
For marine surveys in the range of the coastal shelf with water depths up to about 300 m, the sonar doppler navigation system which is also installed on our vessels PROSPEKTA and EXPLORA is weil suited to supplement the satellite navigation. At greater water depths however, the sonar sea-bottom return signal becomes so weak that only scattered radiation signals of the water volume can be utilized. Additional effects such as currents and movements of fish and plankton decrease the accuracy of sonar measurements considerably.
In the previous phase of deep-sea research by "FS VALDIVIA", satellite navigation could already be supported by an integrated Loran-C radio navigation module built into the INDAS-System, this even though surveys were already being carried out far beyond the normal range of the Hawaii chain. The distances from this most southerly Loran-C chain are however becoming larger as the research work progresses, so that here in the long term, we can expect no further aid.
Because of the shortage of natural islands in the South Pacific, the idea arose of creating an artificial island to carry navigation aids, for example in the form of a buoy. Generally, one requires for navigation purposes a fixed reference point, which an island can indeed offer. Buoys can only be fixed with one or possibly several thin mooring wires. The water depths are over 5000 m, so one has to put up with a really big circle of movement or alternatively one must - at great inconvenience - anchor the buoy to three or four points. This great water depth also rules out the use of sonar-transponders as their range is insufficient. Transponders (abbreviation from TRANSmit and reSPOND) are laid directly on the sea-bottom and are used for example for the so-called "dynamic positioning" of floating drilling rigs.
The NAREF design allows the navigation buoy a considerable circle of movement around the anchor point and requires no inconvenient mooring system. However, the drift rate should be small. In the regions for which the NAREF buoy is intended - the trade-wind zones - it can be assumed that relatively constant wind and current conditions prevail over long .periods. A sufficiently accurate position determination can be made by resection of the buoy's position from the vessel and updating these data during the sporadic satellite passes. Thus between satellite passes, the buoy serves to determine exactly the vessel 's position, considering the measured drift rate. It is thus evident that the NAREF design behaves mutually as position-finder for the buoy and for the vessel. Whenever the vessel receives (relatively infrequent) position fixes from the satellite, the buoy position in the system 's memory is updated, otherwise the vessel 's position is determined relative to the buoy.
Our proposed design for the NAREF buoy was weil received by the groups involved in deep-sea research with "FS VALDIVIA". The GKSS Company (Gesellschaft für Kernenergieverwertung in Schiffbau und Schiffahrt) received a contract from the German Federal Ministry for Research and Technology (BMFT) at the end of 1973 to arrange the developement of such a navigation system. After many preliminary discussions between PRAKLA-SEISMOS, GKSS and various buoy manufacturers and specialists which mostly dealt with suitabJe carrier buoys, mooring systems and power supply systems, the proposals began to take concrete form.
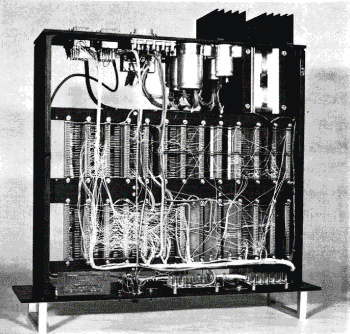
Fig.2
Ansicht des NAREF-Empfängers von unten
NAREF receiver, view from below
In September 1974, PRAKLA-SEISMOS was given the contract to develope and build the electronic modules for the vessel and buoy for a test version of the NAREF-System. The Hagenuk Co. of Kiel was given the contract to deliver the carrier buoy with power supply and mooring system. For the first construction stage, the electronic equipment was basically only designed to check the mooring system and the buoy's behaviour in its intended operational area.
The buoy's electronic equipment (see figures 1 and 2) consists of a 60 Wintermediate wave transmitter which transmits a sequence of two different carrier frequencies in the range of 1.6 to 2 MHz. These carrier frequences are stabilized corresponding to our ANA technique by a highly stable atomic frequency standard. The radiated antenna voltage is additionally phase-stabilized in order to remove the influence of the antenna-detuning caused by the buoy's changing inclination.
To transmit additional data, the carrier frequences can be phase-modulated with auxiliary carriers. At present, only one auxiliary carrier is installed which transmits a warning signal when the state of charge on the power supply batteries becomes too low. If the battery voltage should fall below a set minimum value, the transmitter automatically switches off until the battery has been sufficiently recharged.
In the second stage of development, the installation of an additional receiver system for the OMEGA navigationsystem is planned. In order to be able to use a single antenna both to transmit the ANA carrier-frequencies and to receive the OMEGA signals, the control module of the buoy's transmitter is arranged to switch over in the same time rhythm used by the world-wide OMEGA station-network. To do this, the transmission times of the buoy are set to coincide with the transmission times of the OMEGA-transmitters not suited for that vessel position. This leaves the antenna free to receive the OMEGA-transmitters which are suited for that region.
A navigation receiver has been developed for the survey vessel which picks up the carrier frequences from the buoy. Their phase relationship is compared to that of a signal with the same frequency which is generated by an other atomic frequency standard. From this phase comparison, travel time data is derived which however is ambiguous. But the ambiguity can be reduced by measuring two different carrier frequencies. A built-in redundancy computer immediately shows possible lane slips (lane is a circle with the radius transmitter-ship-distance and with its center at the transmitter). The auxiliary carrier-signal which checks the battery is decoded and starts a flashing warning lamp if the buoy's power-supply voltage falls below a set value.
The Hagenuk Company delivered the carrier buoy with batteries, two wind generators for charging the batteries, a 5 m whip antenna, marker lights, radar reflector and mooring system.
In the first development stage, the buoy's electronics already make available an important information : the oneway radio travel time from the buoy transmitter to the vessel receiver with a range of over 200 km. This can be used to trace and update the buoy's position according to a scheme shown in figure 3.
During the survey voyage, the vessel receives position data from satellite passes at points P₁ , P₂ und P₃. The distances from the buoy to these points - derived from travel time data - are r₁, r₂, and r₃. The paths d₁ and d₁ can be calculated from the satellite positions. By trilateration, the buoy position can be determined in' threefold redundancy from the satellite data using r₁, r₂, d₁ ; r₂, r₃, d₂ and r₁, r₃, (d₁+ d₂). In any case at least 3-fold redundancy of data is necessary as synchronism of the atomic frequency standards is not quite exact. This leads to a random distance error which becomes a further unknown in the calculations.
In practice one now receives continuous satellite position data so that the position error from satellite fixes can be averaged out over many' measurements. The lines joining Pd₁, P₂ and P₃ do not need by any means to be straight. The vessel can follow an arbitrary course but must travel a sufficient distance between fixes for the paths d₁, d₂ etc. to be usable in the calculation. Between satellite fixes, the measured vessel-buoy distances are available as additional navigation aid. However, a single lane is not sufficient to define the vessel's position (the position of the vessel is the intersection of two lanes). But in many cases the computed lane can be combined with one from a shore based station. For example in the South Pacific there is often just one transmitter from the Hawaii LoranChain which can still be weil received , whereas the others are not usable for position determination because of their unfavourable angle of incidence. Here a weil placed NAREF buoy can be of great help. To enable position determination solely with the buoy, a radio direction-finder can also be used. The position of the ship relative to the buoy can then be determined from the distance and the bearing of the buoy to the vessel. However, because of the lack of precision in the radio direction-finder measurement and the typically low sensivity of the direction finder's receiver, this method can only be used for distances up to about 30 km.
In the second development stage the OMEGA radio navigation system in conjunction with the NAREF buoy should become more precise, so that it can be employed as an important part of deep-sea research.
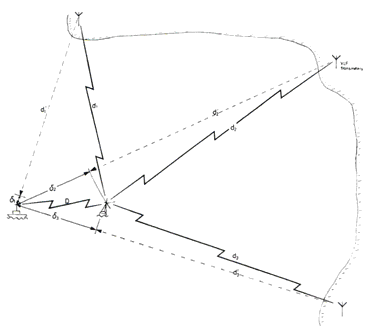
Fig.5
Schema für die Navigationshilfen der NAREF-Boje mit Differential-OMEGA
Scheme for Navigation with the NAREF buoy using differential OMEGA
OMEGA is a long-range navigation-system which, at its present stage of development, is only just short of its goal of world-wide coverage. It works in the VLF waveband with carrier frequencies of 10-14 KHz. The wavelengths involved are thus up to 30 km, which is the order of magnitude of the height of ionospheric layers above the earth 's surface (70- 90 km) . So the interspace between the earth 's surface and the ionosphere acts as a waveguide, giving rise to wave propagation modes similar to the perhaps better known behaviour of wave guides in the microwave band.
Normally two propagation modes are stimulated by the OMEGA transmitter (figure 4), the desired primary and a secondary mode. Each mode is mutually superimposed on the other, leading to instability in the received phase relationship. The phase stability also depends on a constant height of the ionosperic layers. But this height varies with solar radiation.
Finally sporadic anomalies are caused by solar eruptions and so called polar cap absorption. All these wave propagation anomalies lead to a severe limitation of the accuracy of the OMEGA method. If propagation corrections are calculated assuming normal conditions and ignoring solar effects, a position error of one to three nautical miles can result. This error can be largely compensated for if a stationary OMEGA receiver-station, as close to the recording vessel as possible, retransmits its OMEGA signal to the vessel. Then only the difference between the OMEGA signal received by the stationary and by the moving receiver is used to calculate the moving receiver's position. This procedure cancels the effects of propagat ion anomalies on that part of the wave path common to both receivers. This type of navigation is called "Differential OMEGA". It improves the accuracy of position determination by a factor of 5 to 20 times, depending on the distance ratio Vessel-Fixed Receiver / Vessel-Transmitter. Thus, the closer the fixed receiver to the ship, the more accurate the position determination.
Navigation with the NAREF buoy using differential OMEGA is shown schematically in figure 5. Apart from the travel time data D , the implementation of which has already been discussed, three travel-time values d'₁ d₂, d₃ from three OMEGA transmitters for example are measured by the buoy and transmitted to the vessel by means of additional auxilliary carrier-frequencies. On the ship the values d'₁ d'₂ and d'₃ are measured and the differences d'₁-d₁ = δ₁, d'₂-d₂ = δ₂ and d'₃-d₃ = δ₃ are computed. From the difference values δ₁, δ₂, and δ₃ the shipbuoy distance is calculated. Since in general δ₁, to δ₃ are considerably smaller than d'₁, to d'₃ ionospheric propagation anomalies have only a very small effect.
The installation of the electronics into the carrier buoy delivered by Hagenuk was completed on the island of Helgoland in March 1975. As the production of both units had been weil coordinated, a function test proceeded without problems. Tuning the antenna was carried out towing the buoy in the harbour basin. Here too were no problems.
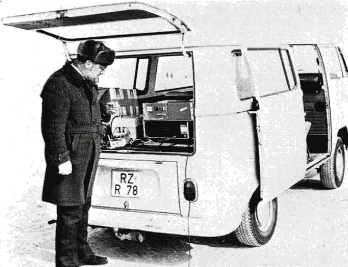
Reichweitentest für das NAREF-Bojen-Signal an der nordfriesischen Küste durch F. Sender
Range test for the NAREF buoy signal along the North Frisian coast by F. Sender
But as we later discovered, although Helgoland and Hawaii have the same initial letter and similarly high prices, they don't share the same good weather. Because of bad weather, the planned mooring of the buoy off Helgoland had to be put off for the time being. A single reception test in the harbour was carried out. The most impressive proof of the good performance of the transmitter was provided by an Englishman who was searching eagerly for a "jamming station" with a test receiver in Helgoland's harbour. The jammed transmitter was a Decca Hi-Fix station working on the other side of the island with frequencies in our buoy's working range which was turned out of synchronization.
In the same month a range test was carried out. Mooring the buoy off Helgoland had been achieved and the receiver was taken to various points on the North Frisian coast by land vehicle in order to test reception strength at different distances from the transmitter. Locations close to the sea near St. Peter-Ording, on Sylt and Fan0, and at Blavandshuk were chosen. The distances from the buoy were between 50 and 160 km. The results of these measurements show a usable range at sea of more than 200 km.
The wind generator-blades caused some difficulties. While tuning the antenna, they had to be fastened as a precaution against an unintended function of " meat grinder" . An unfortunate collision against a harbour pier had damaged one generator blade, the blades from both generators were destroyed by another accident, preventing battery charging during the range tests. To prevent such damage in future, a protective shield was mounted around the blades.
Since these tests, the buoy has been taken to Hawaii. There it will be tested under working conditions such as deep sea mooring and finally detachecl:' This is planned to the end of this year after the arrival of the "VALDIVIA" in Honolulu.