Datenerfassungs
und automatischer Schiffssteuerung
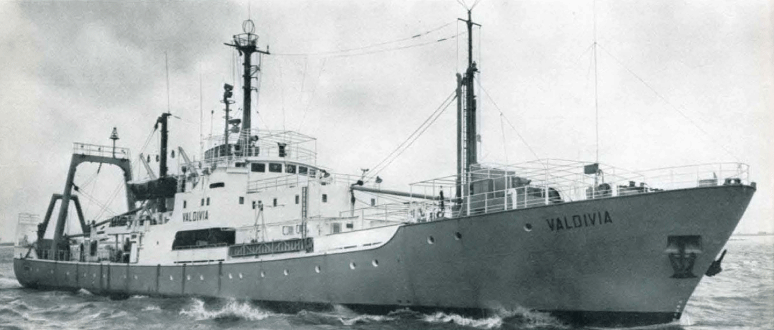
für FS VALDIVIA
In küstenfernen sowie küstennahen Meeresgebieten, die nicht durch Navigationsketten überdeckt sind, war bis vor kurzem eine genügend genaue Navigation unmöglich. Diese Situation hat sich geändert, seit mit dem Satellitennavigationsverfahren eine weltweite Navigation möglich geworden ist:
Vier bis fünf auf Polumlaufbahnen kreisenden Satelliten werden in regelmäßigen Abständen die jeweiligen Bahndaten von Bodenstationen eingegeben. Diese Bahndaten werden von den Satelliten wiederum kontinuierlich abgestrahlt und können von Schiffen, die sich im Sichtbereich eines Satelliten befinden, zur Positionsbestimmung benutzt werden. Hierbei kann eine Positionsbestimmung nur dann mit hinreichender Genauigkeit durchgeführt werden, wenn das Schiff keine Fahrt macht, weil sich eine derartige Messung über den Zeitraum von ca. 10 bis 20 Minuten erstreckt. Aus dieser Messung wird der geographische Ort des Schiffes ermittelt.
Nach dem Satellitenuntergang ist eine Ortsbestimmung erst wieder möglich, wenn der nächste Satellit aufgeht. Dazwischen liegt aber ein Zeitraum von 30 Minuten bis zwei Stunden. Um ein Schiff an jedem Meßpunkt orten zu können, muß deshalb das Satellitennavigationsverfahren durch ein geeignetes Koppelnavigationsverfahren ergänzt werden. Hierfür bietet sich vor allem das Sonar-Doppler-Verfahren an, bei dem die Geschwindigkeit des Schiffes über Grund in Richtung der Schiffsachse und senkrecht dazu gemessen wird. Der Kurswinkel wird durch einen sehr genauen Kreiseikompaß bestimmt. Die Werte von Satelliten-und Koppelnavigation werden in einem Bordrechner mit Hilfe eines umfangreichen Rechenprogrammes so zusammengefaßt, daß die Schiffsposition zu jedem Zeitpunkt mit großer Genauigkeit zur Verfügung steht.
Das Schiff wird vollautomatisch gesteuert. Das geschieht in der Weise, daß im Rechner ein "Sollkurs" zum nächsten anzusteuernden Punkt errechnet wird und die Ruderanlage automatisch die entsprechenden Befehle erhält.
Zum ersten Mal wurde von PRAKLA-SEISMOS ein derartiges integriertes Navigationssystem, bas:erend auf Satelliten-und Sonar-Doppler-Navigation, beim Neubau von FS PROSPEKTA installiert. Eine Reihe von Anpaßgeräten (Interfaces) mußte hierfür entwickelt und gefertigt sowie ein umfangreiches Programm geschrieben werden.
Das Zusammen wirken dieser Geräte und des Programms ergibt ein Navigationssystem von einer so hohen Zuverlässigkeit und Genauigkeit, daß folgendes möglich war: Auf der Rückfahrt der PROSPEKTA von der Doggerbank nach Cuxhaven wurden die Koordinaten des Zielhafens dem System eingegeben. Während der ganzen Fahrt wurde das Schiff automatisch gesteuert. Es erreichte die Hafeneinfahrt nach ca. 24 Stunden mit einem Fehler von weniger als einer Seemeile.
Als wir von den Plänen des Bundesministeriums für Bildung und Wissenschaft erfuhren, das Rohstoff-Forschungsschiff VALDIVIA mit einem weltweit einsetzbaren genauen Navigationssystem auszurüsten, haben wir uns mit dem inzwischen erworbenen " Know-How" um diese Aufgabe beworben. Den Richtlinien des Ministeriums entsprechend, wurde ein sogenannter Forschungs-und Entwicklungsvertrag (FE-Vertrag) vereinbart. Dieser FE-Vertrag umfaßte die Entwicklung und Lieferung eines integrierten Navigationssystems mit Datenerfassung und automatischer Schiffssteuerung.
Unsere Aufgabe bestand also darin, das im Schelfgebiet erprobte Satelliten/Sonar-Doppler Navigationssystem so zu erweitern, daß es auch im Ozean arbeitet, wo der SonarDoppler nicht mehr den Meeresboden erreicht. Der SonarDoppler ergibt jedoch auch dann noch zusammen mit dem Kreiselkompaß eine Koppelnavigation im sogenannten "water track", allerdings relativ zu einem Wasserkörper mit unbekannter Strömungsgeschwindigkeit.
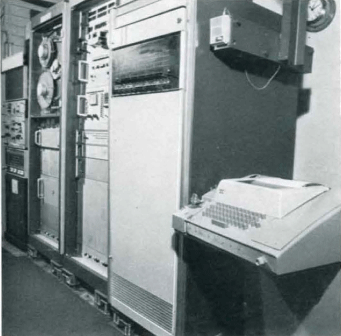
Integriertes Navigations-und
Datenerfassungs-System auf FS VALDIVIA
data acquisition system on RV VALDIVIA
Diese unbekannte Meeresströmung wird von einem weiteren Navigationssystem, dem von PRAKLA-SEISMOS entwickelten Radio-ANA-Empfangssystem, ermittelt. Die RadioANA, die bereits im Report 1/71 und 3/71 erwähnt wurde, benutzt mindestens zwei vorhandene Navigationssender, auch von verschiedenen Senderketten (IJinterchain"). Im Sommer 1971 hatte die Version ANA-R mit einer eigenen Referenzstation an Land bereits erfolgreich auf dem FS VALDIVIA im Roten Meer gearbeitet. Auf dem Pazifik wurde in diesem Jahr die Version ANA-C eingesetzt, die Loran-C Stationen auf den Hawaii-Inseln ausnutzte.
Das gesamte INDAS System wurde innerhalb von vier Monaten zusammengestellt und im Hafen von Honolulu an Bord der Valdivia installiert. Das Datenerfassungssystem sowie die automatische Schiffssteuerung funktionierten von Beginn an einwandfrei. Wegen der unerwartet schlechten Empfangsbedingungen für Radionavigation war die Benutzung der ANA-C zunächst nicht im vorher geplanten Umfang möglich. Mit der Kombination Satellit/Sonar-Doppler und von Hand eingegebenen Werten für die Meeresströmung wurde jedoch eine Genauigkeit erzielt, welche die Fahrtteilnehmer als besser als ausreichend bezeichneten.
Zur Zeit befassen wir uns mit der Weiterentwicklung der ANA-C-Empfangsempfindlichkeit. Außerderm ist ein Rechenprogramm in Arbeit, das die sogenannte Dreifachintegration ermöglicht. Dabei wird aus den drei unabhängigen Systemen Satelliten-, Sonar-Doppler-und ANA-C-Navigation die Position des Schiffes bestimmt. Eine weitere Verbesserung der Ortungsgenauigkeit ist hierbei zu erwarten. Die Datenerfassung soll ebenfalls ausgebaut werden, um eine beliebige Kombination von insgesamt 35 Gebern abfragen und registrieren zu können.
Die bisher erzielten Erfolge auf den Gebieten der Ortung, Navigation und Datenerfassung machen eine Beteiligung von PRAKLA-SEISMOS an der Ausrüstung von deutschen Forschungsschiffen auch in Zukunft sehr wahrscheinlich.
INDAS Our integrated navigation and data aequisition system with automatie steering for RV VALDIVIA
Very exact navigation is of course necessary when carrying out geophysical surveys at sea. The accuracy required in positioning survey points is often only achieved by post survey computation. Only near the coast, radio navigation using transmitter chains, as for example Decca Hi-Fix or specially installed XR Shoran stations, are accurate enough.In areas far from the coast, as weil as in those ne ar the coasts which are not covered by a navigation chain, accurate enough positioning was not possible until recently. This situation has changed since satellite navigation procedures have made world-wide positioning possible.
Orbit data from ground stations are fed at regular intervals into 4 or 5 satellites orbiting over the poles. These orbit data are then re-emitted continuously by the satellites, and can be used for position determination by any ship located within receiving range of the satellite. Such adetermination of position can only be carried out with sufficient accuracy when the ship is stationary, as the measurement takes from 10 to 20 minutes. The measurement gives the geographie position of the ship.
When the satellite sets, another determination of position is only possible when the next satellite rises. There is a time lapse of 30 minutes to 2 hours until this happens. Thus, in order to be able to position a ship at every survey point, the satellite navigation procedure has to be supplemented by a suitable dead reckoning navigation system. For this the Sonar-Doppler system is most suitable ; this system measures the speed of the ship both in the direction of and perpendicular to the vessel's axis. The course is measured by a very accurate gyro-compass. The data from the satellite and the dead reckoning systems are so compiled in a ship's computer, using an extensive program, that the ship's position can be read with the highest accuracy at any time.
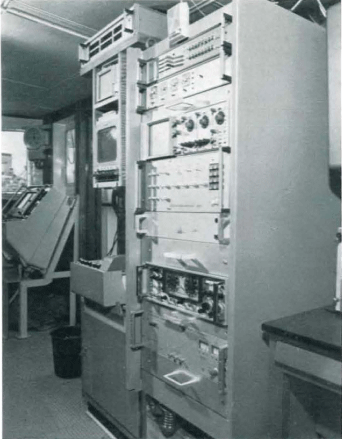 Radio-ANA auf der Brücke des FS VALDIVIA
Radio-ANA auf der Brücke des FS VALDIVIA
Radio-ANA-system on the bridge of RV VALDIVIA
The ship is piloted fully automatically. This is done by the computer which calculates the course to be followed to the next position, and the required instructions being transferred automatically to the steering engine.
An integrated navigation system of this kind, based on Satellite and Sonar-Doppler navigation, was installed by PRAKLA-SEISMOS for the first time in constructing the RV PROSPEKTA. For this aseries of interfaces had to be developed, and an extensive program had to be written.
The combined effect of these instruments and programs produces a navigation system of such high accuracy and reliability that it was possible to achieve the following: On the return voyage of the PROSPEKTA from the Dogger Bank to Cuxhaven the co-ordinates of the port of destination were fed into the system. During the whole journey the ship was steered automatically, and after about 24 hours it reached port with an error of about one nautical mile.
When we heard that the Federal Ministry for Education and Sciences planned to equip the RV VALDIVIA with an accurate navigation system which could be used all over the world, we applied for the task, having gained meanwhile the necessary "know-how". Following the minister's regulations a so-called research and development contract (FE contract) was agreed upon. This FE contract included the development and production of an integrated navigation system with data acquisition and automatie ship's steering.
Our task was this to extend the Satellite / Sonar-Doppler navigation system tested in shelf areas, so that it could also be used in the oceans, where the Sonar-Doppler no longer reaches to the sea bed. The Sonar-Doppler together with the gyro-compass however produces dead reckoning navigation in the " water track11 , although this is relative to a water body with unknown current velocity.
These unknown currents are determined by another navigation system -the Radio ANA -developed by PRAKLASEISMOS. Radio ANA, which was mentioned in the 1/71 and 3/71 Reports, uses at least two existing navigation transmitters from one or more different transmitter chains (" interchain"). In the summer of 1971 the ANA-R version had already worked successfully on the RV VALDIVIA in the Red Sea, using one own reference station onshore.
The totaliNDAS system was set up within 4 months, and installed on board the vessel VALDIVIA in the harbour at Honolulu. The data acquisition system and the automatie ship's steering functioned perfectly from the very beginning. Due to the unexpectedly poor receiving conditions for radio navigation it was at first not possible to use the ANA-C to the extent previously planned. However, with the combinati on of Satellite / Sonar-Doppler and current values fed in by hand, an accuracy was achieved which was described by the crew as more than satisfactory.
At the moment we are occupied with the further development of receiver sensitivity of the ANA-C system. In addition a computer program is in preparation which makes socalled 3-fold integration possible. By this the ship's position is determined from three independent systems -Satellite, Sonar-Doppler, and ANA-C navigation. A further improvement in positioning is thus expected. Data acquisition is also to be extended, in order to be able to record any combination of 35 transmitters in all.
The success so far achieved in the fields of positioning, navigation and data acquisition makes it very probable that also in the future PRAKLA-SEISMOS will take part in the equipping of German research vessels.